
테스트 환경
- ORIN NX
테스트 전 Isaac Ros에 필요한 Components 설치 필요
Jetson SDK Componenets 설치
우선 HOST PC와 JETSON 장치를 USB Type-B(PC측은 Type-A)로 연결한다. 1. Linux HOST PC에 NVIDIA SDK Manager를 설치 Linux 호스트 PC에서 브라우저를 열고 NVIDIA 공식 웹 사이트에서 NVIDIA SDK Manager를 다운로드해야 한
rorsi.tistory.com
위 작업 선 진행 후 아래 작업 진행
1. JETSON 성능 최적화 및 Docker 설치
Compute Setup — isaac_ros_docs documentation
© Copyright 2023, NVIDIA. Last updated on Dec 09, 2023.
nvidia-isaac-ros.github.io
2. 개발에 필요환 환경 설정
https://nvidia-isaac-ros.github.io/getting_started/dev_env_setup.html
Developer Environment Setup — isaac_ros_docs documentation
The development flow currently supported by Isaac ROS is to build on your target platform. You can setup ROS 2 Humble in your host machine with the Isaac ROS Buildfarm and setup dependencies with rosdep OR you can use the Isaac ROS Dev Docker-based develop
nvidia-isaac-ros.github.io
3. isaac_ros 실행 방법
isaac_ros_unet — isaac_ros_docs documentation
Note The raw segmentation mask is also published to /unet/raw_segmentation_mask. However, the raw pixels correspond to the class labels and so the output is unsuitable for human visual inspection.
nvidia-isaac-ros.github.io
실행 결과
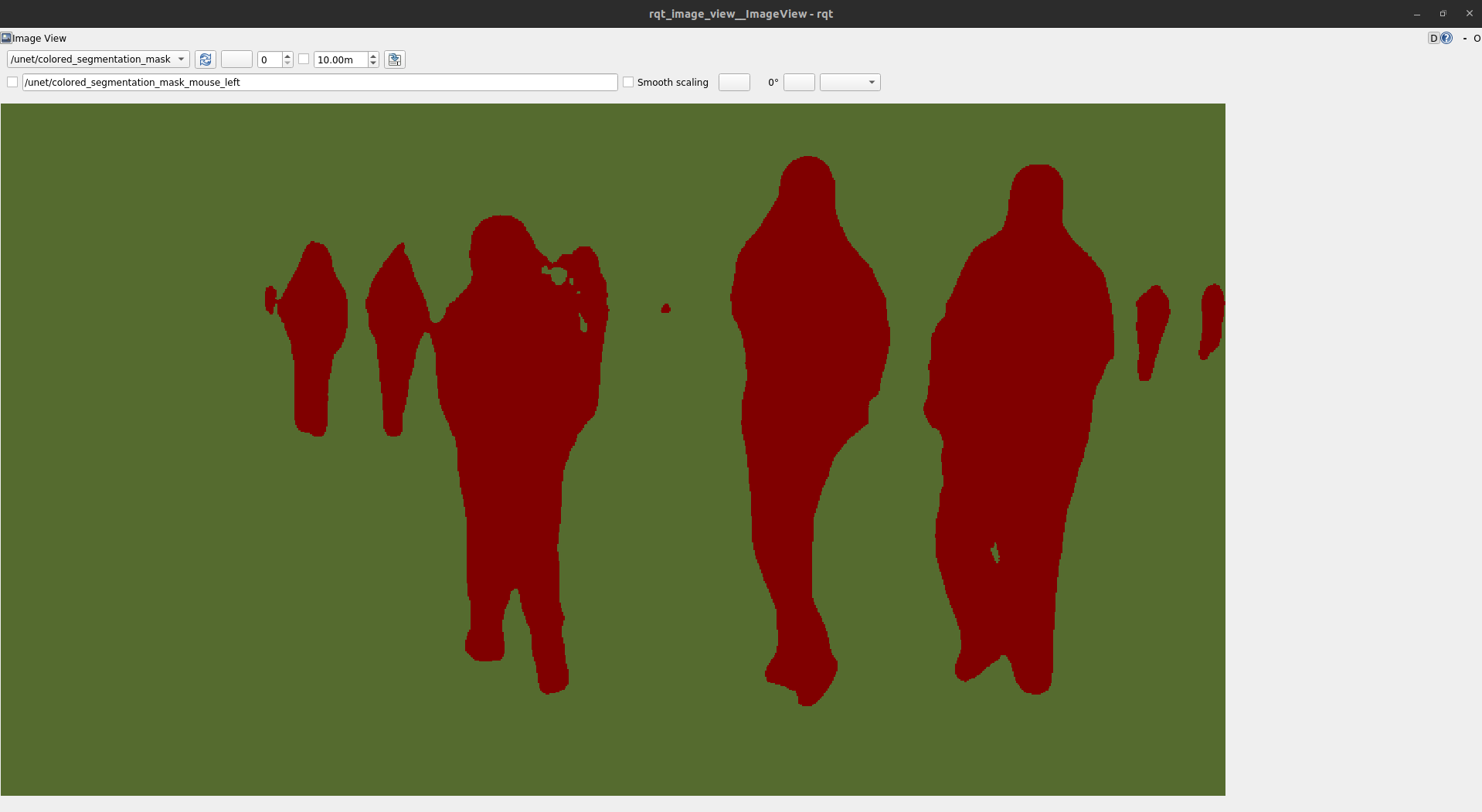
위 결과는 rosbag에서 기본 이미지를 publish 하여 나오는 결과이다. 예제로 실행되는 이미지가 아닌 USB 캠을 사용하고 싶을 때 rosbag을 중단하고 새로운 터미널을 열어 아래 명령어 실행
ros2 run image_publisher image_publisher_node /dev/video0 --ros-args -r image_raw:=image
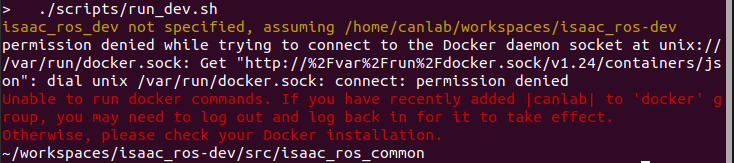
명령어 실행 중 위와 같은 에러가 나올 시 아래 명령어 입력 후 재 시도
sudo usermod -aG docker $USER
newgrp docker
'NVIDIA > Jetson' 카테고리의 다른 글
| Jetson Sytem Upgrade (0) | 2024.05.11 |
|---|---|
| MIPI-CSI 카메라 드라이버 개발 - 1 (0) | 2024.02.22 |
| Virtual Machine Jetson Flash (1) | 2023.08.15 |
| Linux to Jetson USB 테더링 (1) | 2023.07.16 |
| Window to Jetson USB 테더링 (0) | 2023.07.11 |